
10 Déc Le LabISEN participe au Dronathlon organisé par la Marine Nationale
Du 7 au 11 octobre 2024, la Marine Nationale a organisé la première édition du « Dronathlon », un événement innovant rassemblant des entreprises et laboratoires de recherche pour relever des défis technologiques liés à la maîtrise de l’espace aéromaritime. Parmi les groupements sélectionnés pour participer, le LabISEN, laboratoire de recherche de l’ISEN Ouest, a été impliqué dans 2 d’entre eux aux côtés de nos partenaires Alseamar, Athanor, Magellium, Carbon01, et Pair Work (coordinateur).
Leur participation s’inscrivait dans une volonté de rayonnement national, de collaboration interdisciplinaire avec l’implication des équipes AutoRob et KLaIM dans le projet, et de progrès sur des thématiques de recherche encore peu explorées.
L’événement répondait à un appel à manifestation d’intérêt lancé par la Marine Nationale. Les participants devaient concevoir des solutions innovantes pour des missions de reconnaissance de zones côtières et d’établissement de situations en zones hauturières hors ZEE, essentielles à la maîtrise de l’espace aéromaritime dans un contexte stratégique. Avec plus de 70 candidatures reçues, la compétition a mis en lumière le dynamisme de la recherche française.
La conception de drones innovants : l’expertise d’AutoRob
Pour relever les défis de la zone côtière, l’équipe AutoRob du LabISEN a développé deux drones novateurs au sein de ses groupements, chacun correspondant à une mission spécifique.
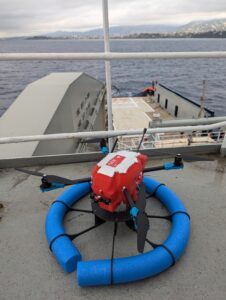 Le Pelikwad, est un drone quadricoptère amphibie capable de voler, d’amerrir, et de redécoller.
Le Pelikwad, est un drone quadricoptère amphibie capable de voler, d’amerrir, et de redécoller.
Face au risque élevé de pertes matérielles en milieu marin, l’équipe a adopté une stratégie de conception économique en tirant parti des ressources disponibles au laboratoire. Le drone repose sur une architecture électronique open source basée sur la carte PixHawk et communique via le protocole MAVLink. Parmi les ajouts spécifiques, un système d’amerrissage, un capteur de salinité, une caméra, et un microcontrôleur optimisé ont été intégrés.
Le second prototype, l’EkkoCopter, est un drone destiné à relayer des communications entre plusieurs engins. La distance importante entre le Pelikwad et le PC de commande pouvant parfois perturber la communication, l’Ekkocopter prend la fonction de relais de communication. Léger et robuste, il a été conçu pour maximiser la transmission d’informations en mer.
La logistique a également représenté un défi majeur puisque le matériel, particulièrement fragile, devait être transporté en toute sécurité jusqu’au lieu de l’événement. Une planification minutieuse incluant des outils de réparation et des simulations préalables a permis de limiter les imprévus sur le terrain.
La modélisation de l’environnement marin : un thème privilégié par KLaIM
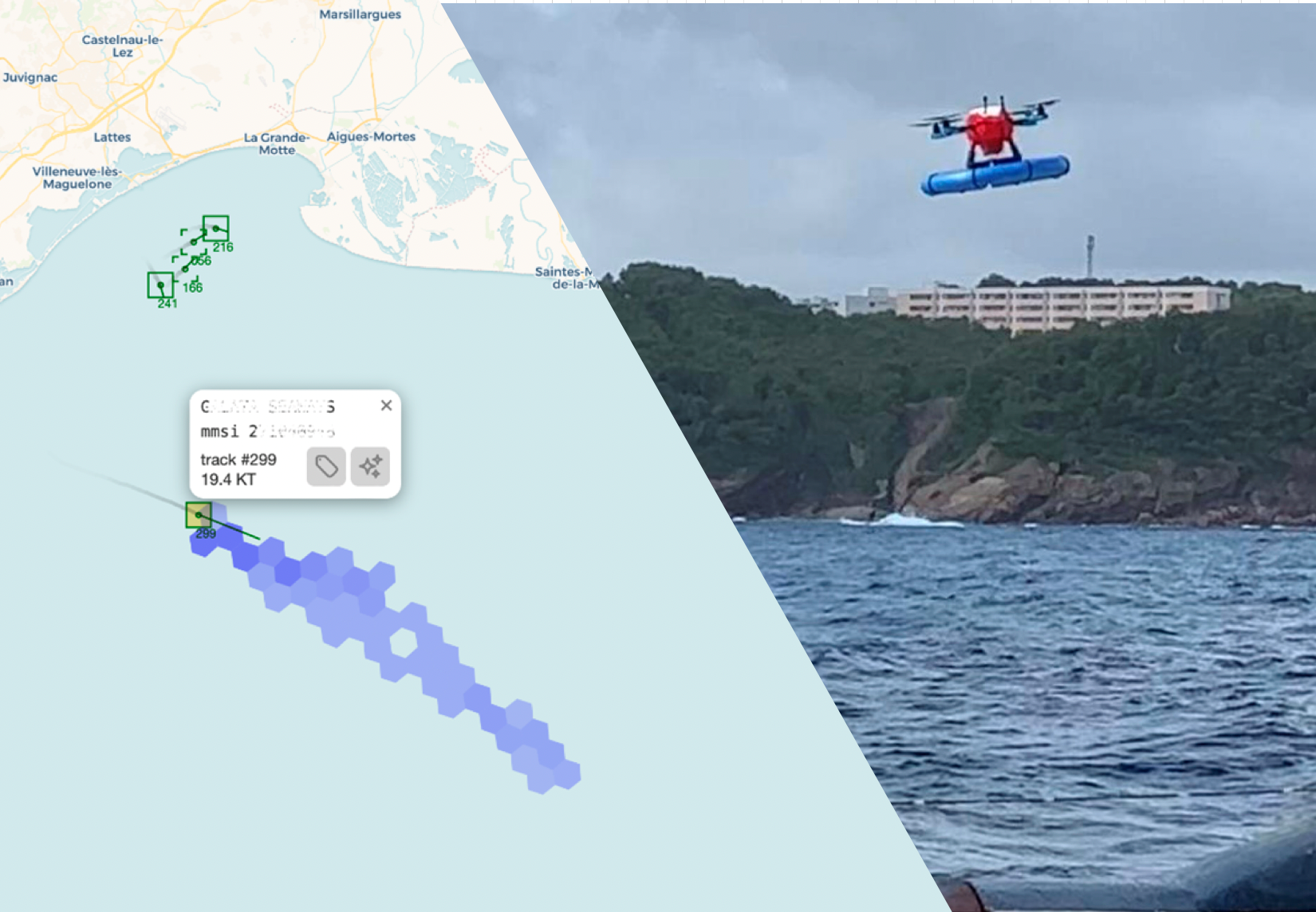
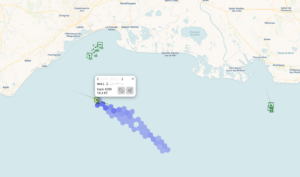
En parallèle, l’équipe KLaIM s’est concentrée sur la modélisation et la prédiction des trajectoires maritimes via des données AIS (Automatic Identification System). Ces données sont transmises par radio VHF entre navires et systèmes à terre (CROSS), à des fins de surveillance du trafic maritime et de sécurité en mer.
Les chercheurs de l’équipe KLaIM ont analysé des données AIS obtenues pendant plusieurs mois via des relais à terre pour identifier et quantifier les motifs de déplacement habituels dans la zone d’opération choisie pour le Dronathlon. Ces données ont été discrétisées via un index géospatial open-source et compilées sous la forme fragments de trajectoires. Ces fragments peuvent servir ensuite de support à des modèles de Markov d’ordre N qui permettent aussi bien de simuler le trafic maritime, que de tenter prédire la trajectoire d’un navire, ou encore juger si son comportement est inhabituel. Un des avantages de cette approche tient à sa frugalité en ressources de calcul.
Un défi grandeur nature en mer
L’épreuve en conditions réelles a poussé les prototypes et les équipes dans leurs retranchements. Pour le Pelikwad, la mission consistait à :
- Décoller depuis un bateau en mer (une manœuvre rendue difficile par les courants aériens instables à proximité de la coque).
- S’éloigner à une distance de 50 mètres du navire-mère.
- Amerrir et dériver pendant au moins 30 minutes tout en collectant des données.
- Redécoller pour retourner sur le bateau.


Les conditions météorologiques changeantes, typiques du milieu marin, ont mis à rude épreuve la stabilité des drones et les systèmes de communication.
Le drone a réussi sa mission première qui était d’amerrir et de dériver sans se retourner sous l’effet de la houle. C’est une preuve de concept validée pour l’équipe AutoRob.
Le redécollage du drone n’a pas pu se faire à cause de multiples coupures rapides de la communication avec le PC de commande. Il a été récupéré manuellement au large.
Certaines données ont néanmoins été enregistrées et pourront être exploitées.
Pendant ce temps, le système d’analyse des données AIS déployé par l’équipe KLaIM recevait en temps réel les données AIS acquises sur zone par le drone CGT50 fourni par notre partenaire Carbon01. Ce drone de 4m d’envergure, capable de décoller et aponter comme un hélicoptère mais de voler comme un avion emportait avec lui un système de réception AIS en plus de sa boule optronique de haute performance. En s’intégrant à la « bulle d’information tactique » déployée sur le navire, le système de KLaIM a pu exploiter directement les données AIS et les traiter en temps réél.
Un bilan prometteur pour l’avenir du LabISEN
Après cette première preuve de concept validée, l’équipe AutoRob du LabISEN va travailler au développement du Pelikwad. Ce type de drones pourrait révolutionner la prise de données dans le milieu marin. En ajoutant des capteurs au drone existant, ce dernier serait capable de prendre des mesures en étant piloté depuis la côte, sans avoir à se déplacer physiquement en mer.
Le développement du démonstrateur de l’équipe KLAIM a permis de valider les grands principes et l’intérêt de l’approche. Les travaux continuent, notamment avec une perspective de collaboration internationale sur le sujet.
Au-delà de l’aspect compétitif, le Dronathlon a permis de mettre en lumière la capacité d’innovation du LabISEN. Pour les équipes AutoRob et KLaIM, cette expérience a représenté une opportunité unique de tester leurs concepts en conditions réelles, d’identifier des axes d’amélioration et de renforcer la synergie entre les disciplines.
Sur le plan scientifique, les avancées réalisées dans la captation des données maritimes par drone, ouvrent de nouvelles perspectives de recherche et de développement. Pour le laboratoire, cet événement constitue une vitrine de son expertise auprès d’acteurs stratégiques.